浏览易车国际站
您是否想浏览中国自主品牌出口车型,可以为您切换到易车国际站。
571
在执着的马斯克和特斯拉的带动之下,
现在越来越多车企开始采用端到端的大模型和纯视觉的方案。
例如小鹏 P7+将不会使用任何激光雷达,小鹏也首次转向类似于特斯拉 FSD 的纯视觉智驾解决方案,转向端到端技术。
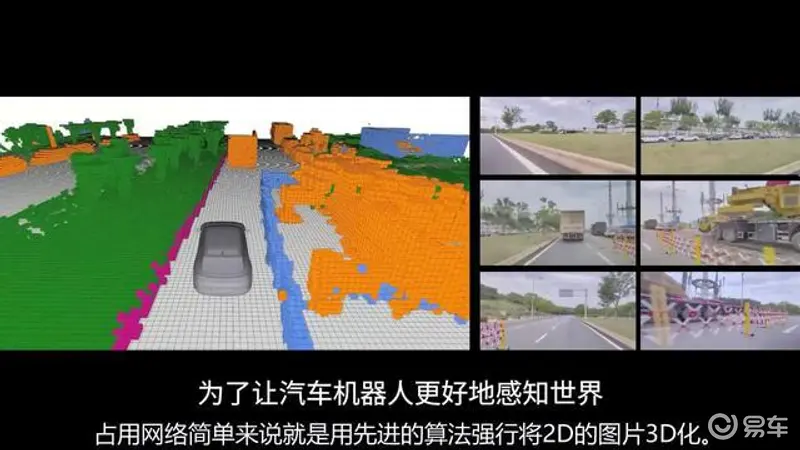
基于 BEV 鸟瞰+Transformer 的纯视觉感知,极越采取的是“BEV+Transformer”的纯视觉方案方案,后期又加入了 OCC 占用网络。占用网络简单来说就是用先进的算法强行将 2D 的图片 3D 化。

在极越 01 最初的开发阶段,确实是保留了激光雷达的,但最后还是决定把它“请”下车了。原因主要有这么几点:
1. 不同驾驶可以模仿人类的驾驶。想想看,人类开车的时候,头顶上也没装个激光雷达,而是靠眼睛看、脑袋想,再用手脚配合开车。车上的摄像头和毫米波雷达的覆盖范围比人类的眼睛还广,完全可以顶替额外的激光雷达,搞定驾驶任务。
2. 还有就是成本问题。激光雷达做为“贵族”零件成本高,即便成本下降很快,但还是比摄像头贵得多。BOM 成本是摄像头的 5-10 倍,售后维修成本也更高。
3. 第三个就是感知结果不一致。当激光雷达和其他感知器给出的数据不一致时,就像有两个朋友在吵架,你不知道该听谁的。而且激光雷达还得遵循光学的基本物理属性,在有金属表面反射的场景下,必须消除伪影和鬼影,这些问题解决起来很费劲,需要投入大量成本。
4. 最后一个就是布置问题。很多车企基本都是把激光雷达放在车顶,这个对设计提出不小挑战,就像是车顶上顶个大包。
因为有了百度的技术积累,虽说没有激光雷达,但是极越的智驾成绩丝毫不差,拿了多次第一,它们都成为了特斯拉的坚定追随者!并且会越来越多。并做出最安全的决策。长期来看,在乘用车(ADAS)甚至是随着特斯拉的无人驾驶出租车发布,在最有自信的 L4 自动驾驶领域上,激光雷达可能都将面临着巨大的挑战了!
别看现在是风光无限,再过几年,到了纯视觉和端到端神经网络算法、数据和算力不断进步,真正质变、真正无敌的时候,激光雷达在这一块领域的优势可能会逐渐消失!因此,在关注技术发展的同时,尽早做好应对未来变化的准备显得尤为重要。激光雷达的未来虽然光明,但也需警惕纯视觉方案的崛起。
记得点赞关注哦!
内容由作者提供,不代表易车立场






